- 首页
-
行业应用
智慧水域
以“无人化、智能化、一体化”为核心,构建覆盖全场景的水域智慧解决方案。整合水面机器人、智能监测终端与云端管理平台,聚焦水质监测、水文测绘、水域巡逻、环境治理、航运辅助等核心需求。凭借轻量化设计、高效机动性能与全天候作业能力,替代传统人工模式,为环保、水利、安防、港口航运等行业提供安全、高效、低成本的水域管理新范式,助力打造“透明化、精细化、智慧化”的现代水域治理体系。

海洋服务
深耕水下0-300米近岸与浅海作业场景,提供集“探测-检测-作业-数据服务”于一体的全链条解决方案。可高效完成如船舶清洗、水下巡检、管线探测、船体检测、水下施工、应急救援等任务。具备强抗干扰、高稳定性、操作便捷等优势,广泛应用于海洋工程、港口维护、渔业养殖、近海安防等领域,以技术创新破解近岸水下作业难题,赋能海洋经济高质量发展。

-
核心产品
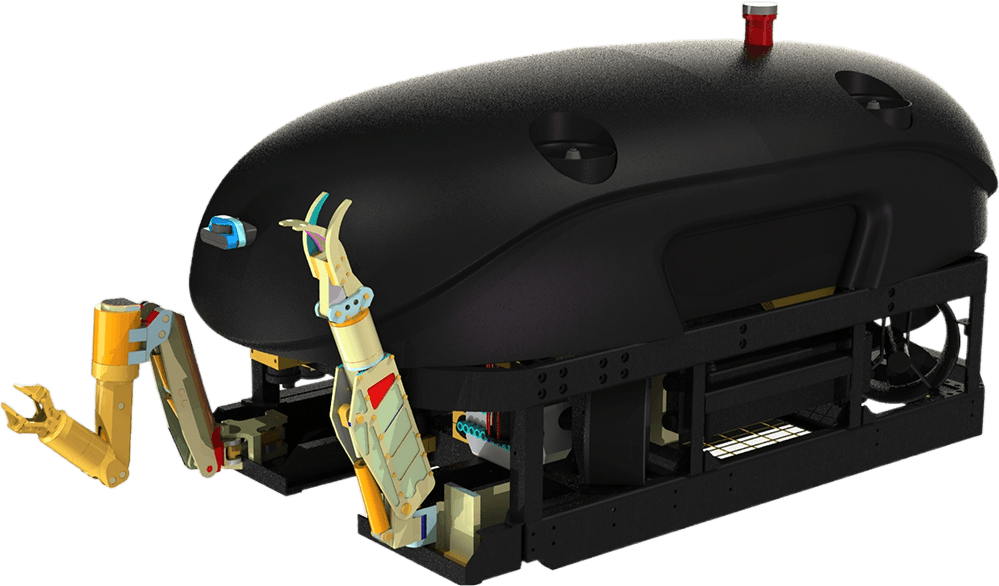
海洋机器人
聚焦0-10000米全水域作业全场景需求,可在船舶清洗、水下检测、资源开发、深海勘测等领域高效执行任务。24小时不间断高效运作,重新定义海洋探索与开发的效率边界。

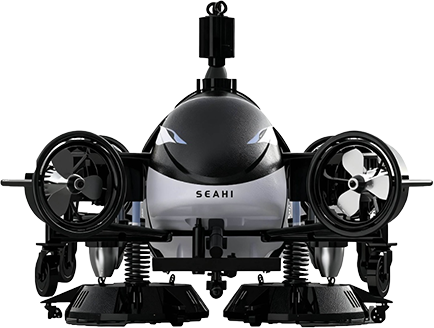
水面机器人
适用于水质监测、水文测绘、水域巡逻、环境治理等多元场景,具备全天候作业能力,无需人员下水即可完成复杂任务,为环保、水利、安防、运输等行业提供安全、高效、低成本的水域作业新范式。

核心配件
以“高可靠性、高兼容性、高性能指标”为核心,实现精准感知、快速响应、稳定运行的核心功能。作为机器人整机性能的关键支撑,为行业客户提供定制化配套解决方案,以硬核技术赋能全球智能装备产业升级。

- 探索世航
- 世航资讯
- 招贤纳士
- 联系我们
















CN 



