在今年人形机器人企业大额融资拿到手软的“资本蜜月期”,金沙江创投主管合伙人朱啸虎却公开表示“正在批量退出人形机器人”,而不久后,金沙江创投就将目光转向了一家水下机器人企业,参与了其Pre-A轮融资。
朱啸虎在投资界素有“独角兽捕手”的称呼,其投资风格被评价为“在争议中布局,在狂欢中离场”,金沙江创投的入局,是否预示着水下机器人将会是新的蓝海和风口?
技术大咖领衔
瞄准水体机器人商业化
5月16日,世航智能宣布连续完成了天使+轮和Pre-A轮融资,两轮累计融资金额达到5000万元人民币,其中天使+轮由招商局集团招商启航资本领投,Pre-A轮由金沙江创投、云泽资本联合领投,昆山天使基金、吴中金控、鞍羽资本跟投。
世航智能成立于2023年3月,是一家专注于水体机器人及智能无人装备自主研发、生产、销售、服务的科技企业。(注:水体机器人包括水下机器人、水面机器人等)
世航智能的团队大多来自哈尔滨工程大学、水利部、中科院等具备学科优势的科研院所和单位,在无人系统技术、军工行业市场、水体智能装备领域积累了丰富的经验。其创始人陈晓博更是在水下机器人领域深耕18年,主持了20余项国家国防重大科研计划,曾获得”海洋强国青年科学家”“国防科技进步一等奖”等荣誉,三度摘得中国机器人大赛冠军。
2016年,陈晓博从海外公派留学深造回国后,便开始推动机水下机器人的技术升级和产业化应用。
谈到创业的初心,陈晓博表示“在科研项目中,我们很多技术指标都达到国内、国际第一的水平,但项目结题就戛然而止了,没有进一步产业化,在产业化和产品化层面,我们和国外差距还很大”。
2020年,陈晓博团队推出了商业化的水体机器人产品,2023年,世航智能在北京、苏州正式落地,以水体无人装备研造、水体及其资产维护为两大核心业务。
世航智能产品最早商业化应用是在船舶水下清洗领域,面对船舶清洗中面临的不规则曲面和海浪冲击、定位通信受限等问题,世航智能自主研发了具备强抗流的控制系统、长寿命高可靠性的动力系统、传感系统、定位系统、防水密封系统、动力布放系统这6大系统,可以应对不规则曲面和浪涌,在水下稳定高速地自由作业。
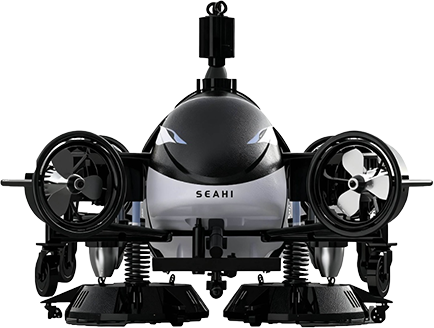
目前,世航智能分别研发了水下机器人“虎鲸”、水面机器人“虎鲨”两大拳头产品系列,用在国防、应急、环保、航运、水利等领域,在水下0-300米层面已经实现商业化,其客户包括国能航运、华电科工、招商局等航运企业,同时世航智能也与青岛港、烟台港、天津港等港口集团达成合作。

世航智能“虎鲸”水下智能检测清洗机器人
此外,陈晓博透露,2024年世航智能收入实现翻倍增长,并且大约有一半的清洗订单来自海外客户,如新加坡、泰国等地,未来也计划以东南亚为跳板,将业务覆盖至欧洲、北美等区域。
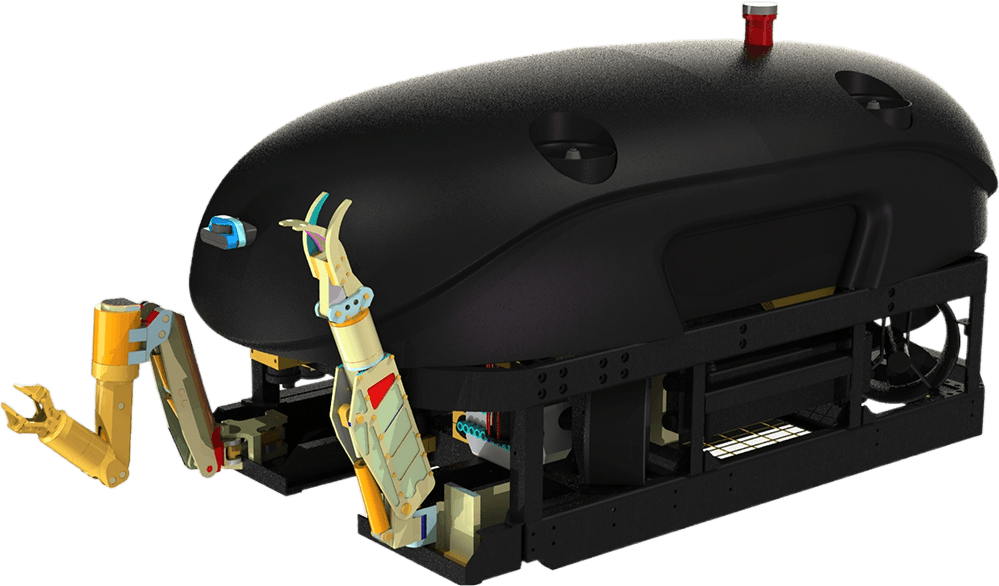
对于公司接下来的发展方向,陈晓博表示,世航智能研发的产品为水下通用机器人,其不同的作业模块要适应更多场景方向,之后融资资金将会投入AI大模型、深度学习等技术层面,包括深海机器人SEAHI X系列的研发投入,打造解放0到1万米深海的超级生产力。
“深海科技”政策催化
国产水下机器人逐浪前行
2025年《政府工作报告》首提“深海科技”,并且对标商业航天、低空经济等,将其列为国家战略性新兴产业,因而2025年被外界视作中国深海科技“元年”,相关政策将进一步催化“深海科技”上下游产业链的完善和发展。
世航智能表示,目前我国海洋高端工程核心设备自给自足率不到5%,与陆地环境相比,深海环境具有高压、低温、黑暗等极端环境特征,因此对设备材料、密封技术和能源系统提出极高要求。
传统深海作业存在耗时耗力和安全风险的痛点,比如传统铺管作业水深超过200米时,需依赖多功能支持船释放遥控水下机器人进行着泥点监测,不仅增加了船舶交叉作业风险,还大幅提高了海管铺设成本。
而作为开发海洋资源的核心装备,水下机器人堪称是海洋经济中的超级生产力,从产品类型来看,主要分为缆控水下机器人(ROV)和自主水下航行器(AUV)两大类,ROV依靠脐带电缆提供动力,作业能力和续航能力较强,AUV 自带能源自主航行,可执行大范围探测任务。
水下机器人行业准入门槛较高,过去长期被欧美、日韩等国外企业技术垄断,不过,近年来国内企业奋起直追,也已开发了多款自主水下机器人产品,可潜入水中甚至深海,代替或辅助人类进行极限作业,用于打捞救援、水下探测、水下资源开采等场景。
经过10年左右的发展,世航智能等国产水下机器人企业积极寻求技术创新,已从不同角度发力,带动国内水下机器人行业产品升级,加速国产替代进程,具体来看:
虽然深海科技迈向“未来产业”的号角已经吹响,但整体来看,国产水下机器人和智能装备市场格局较为分散,集中度低,尚未形成集聚效应,技术水平仍存在提升空间。
业内人士透露,造成国产水下机器人技术发展缓慢的原因之一,在于业内暂未整合出成熟的水下机器人产业链,寻常的陆用、空用机器人零部件及配件通常在抗水流和抗腐蚀性能上有欠缺,大多企业只能定制采购和自研,需要花费大量的资金在研发投入和自建工厂上。该业内人士表示,未来水下机器人配套产业链有望成为一个新的商业“蓝海”。
同样,资本对企业资金的投入加持、地方政府和国家政策的倾斜扶持,企业对核心技术和零部件的自有研发,将形成一股三角力量,为人类探索广阔海洋带来源源不断的超级引擎,在商业化路径逐渐清晰、先发企业订单排期爆满的今天,相信不少资本敏锐的嗅觉,已经盯上了这片广阔天地,正踌躇满志、蓄势待发。